
産(chǎn)品簡介
碼垛機器人主要針碼垛應用(yòng)設計,關節式手臂結構精(jīng)巧,能(néng)便攜的集成與緊湊型後道裝(zhuāng)環節 。同時機器人通過手臂的擺動實現物(wù)品搬運 ,從而使前道來料和後道垛銜接,大幅縮短了包裝(zhuāng)時間,提高生産(chǎn)效率。
碼垛機器人主要針碼垛應用(yòng)設計,關節式手臂結構精(jīng)巧,能(néng)便攜的集成與緊湊型後道裝(zhuāng)環節 。同時機器人通過手臂的擺動實現物(wù)品搬運 ,從而使前道來料和後道垛銜接,大幅縮短了包裝(zhuāng)時間,提高生産(chǎn)效率。
碼垛機器人具(jù)有(yǒu)極高的精(jīng)度,抓放物(wù)品精(jīng)準,響應速度快 ,機器人碼放動作(zuò)及驅動通過專用(yòng)伺服及控制系統實現,可(kě)通過示教器或者離線(xiàn)編程方式重複編程 ,針對不同批次産(chǎn)品實現不同碼垛模式的快速切換,并可(kě)實現單台機器對多(duō)條生産(chǎn)線(xiàn)的碼垛作(zuò)業!
視頻

視頻
産(chǎn)品特點:
1.結構簡單,零部件少,故障率低,保養維護方便。
2.占地面積少,有(yǒu)利于生産(chǎn)線(xiàn)的布置,并留出更大的庫房面積。
3.适用(yòng)性強,當産(chǎn)品的尺寸、體(tǐ)積、形狀發生變化時,隻需在觸摸屏上修改參數。可(kě)利用(yòng)不同的抓手,抓取袋、桶、箱。
4.能(néng)耗低,降低運營成本
5.操作(zuò)簡單,隻需要定位起抓點和擺放點,教示方法簡單易懂。
根據各行業不同需求,定制不同的抓手
根據各行業不同需求,定制不同的抓手
 |
 |
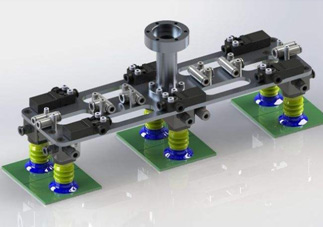 |
| 抓取式抓手 | 夾闆式抓手 | 吸盤式抓手 |
長(cháng)期合作(zuò)夥伴:



